Serie de robots de soldadura


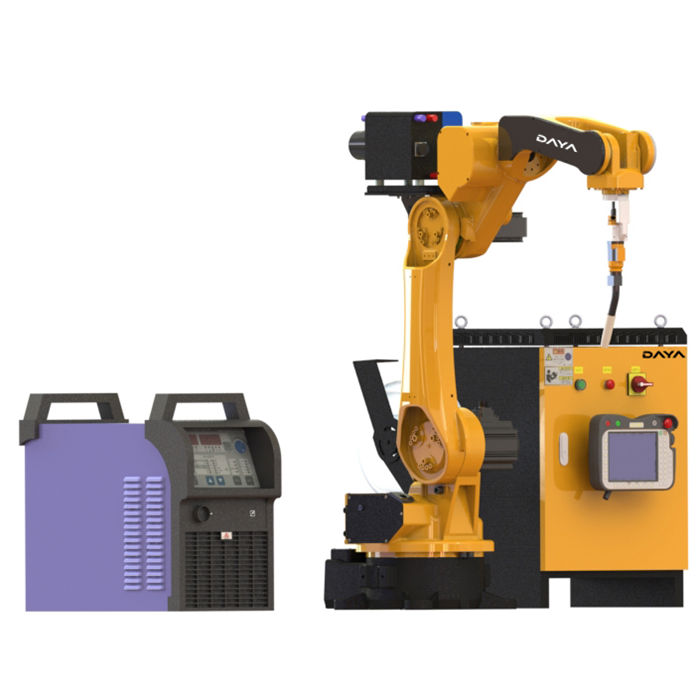

Robot de soldadura

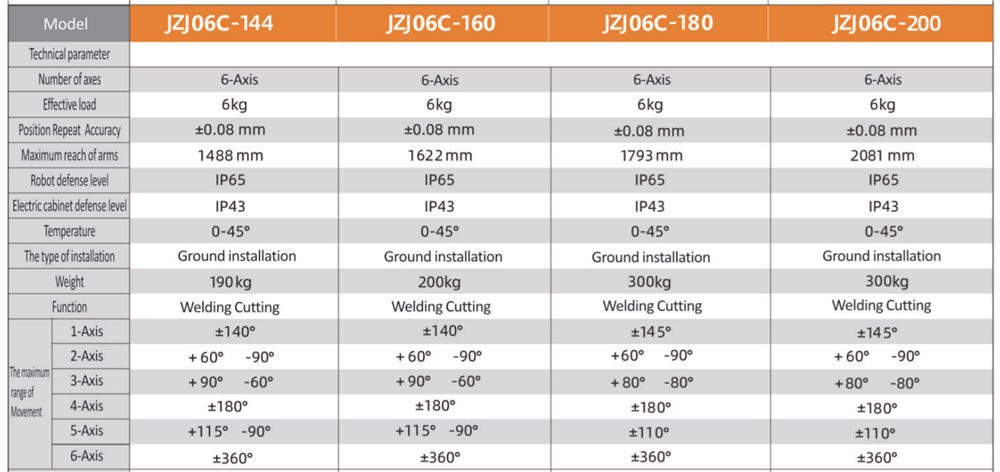
Robot de soldadura serie JZJ06C-180
Robot de soldadura serie JZJ06C-144

Robot de soldadura serie JZJ06C-160

Robot de soldadura serie JZJ06C-200
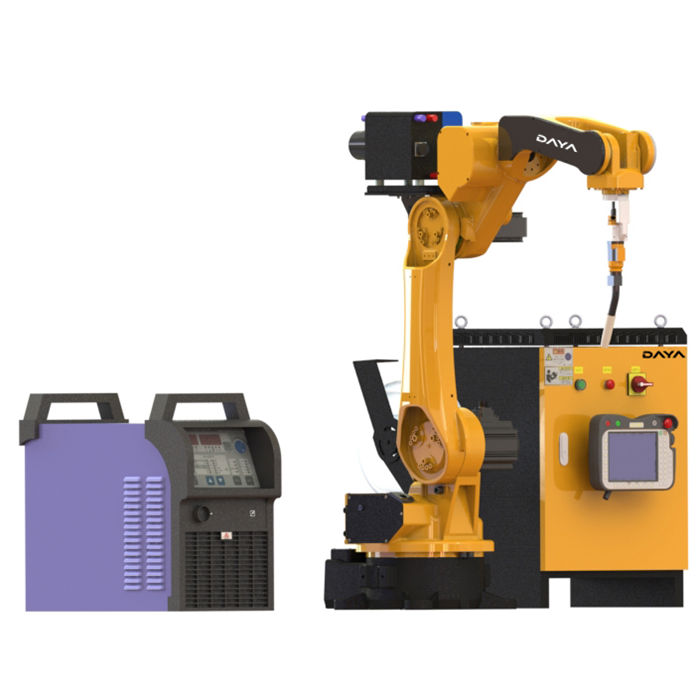
Breve introducción
El robot de soldadura es un robot industrial dedicado a la soldadura (incluido el corte y la pulverización). De acuerdo con la definición de la organización internacional para la estandarización (ISO) de que el robot industrial pertenece al robot de soldadura estándar, el robot industrial es un manipulador programable repetible y multipropósito con tres o más ejes programables, que se utiliza en el campo de la automatización industrial. Para adaptarse a diferentes aplicaciones, la interfaz mecánica del último eje del robot suele ser una brida de conexión, que se puede conectar con diferentes herramientas o efectores finales. El robot de soldadura consiste en instalar pinzas de soldadura o pistola de soldadura (corte) en la brida del eje del extremo del robot industrial, para que pueda realizar soldadura, corte o pulverización térmica.
La soldadura robotizada es el uso de herramientas programables mecanizadas (robots), que automatizan completamente un proceso de soldadura tanto al realizar la soldadura como al manipular la pieza. Los procesos como la soldadura por arco metálico con gas, aunque a menudo están automatizados, no son necesariamente equivalentes a la soldadura por robot, ya que un operador humano a veces prepara los materiales que se van a soldar. La soldadura robotizada se usa comúnmente para soldadura por puntos de resistencia y soldadura por arco en aplicaciones de alta producción, como la industria automotriz.
La soldadura robotizada es una aplicación relativamente nueva de la robótica, aunque los robots se introdujeron por primera vez en la industria estadounidense durante la década de 1960. El uso de robots en la soldadura no despegó hasta la década de 1980, cuando la industria automotriz comenzó a usar robots de manera extensiva para la soldadura por puntos. Desde entonces, tanto el número de robots utilizados en la industria como el número de sus aplicaciones ha crecido enormemente. En 2005, más de 120.000 robots estaban en uso en la industria de América del Norte, aproximadamente la mitad de ellos para soldadura. [1] El crecimiento está limitado principalmente por los altos costos de los equipos y la restricción resultante a las aplicaciones de alta producción.
La soldadura por arco robotizada ha comenzado a crecer rápidamente recientemente y ya controla alrededor del 20% de las aplicaciones de robots industriales. Los componentes principales de los robots de soldadura por arco son el manipulador o la unidad mecánica y el controlador, que actúa como el "cerebro" del robot. El manipulador es lo que hace que el robot se mueva, y el diseño de estos sistemas se puede clasificar en varios tipos comunes, como SCARA y robot de coordenadas cartesianas, que utilizan diferentes sistemas de coordenadas para dirigir los brazos de la máquina.
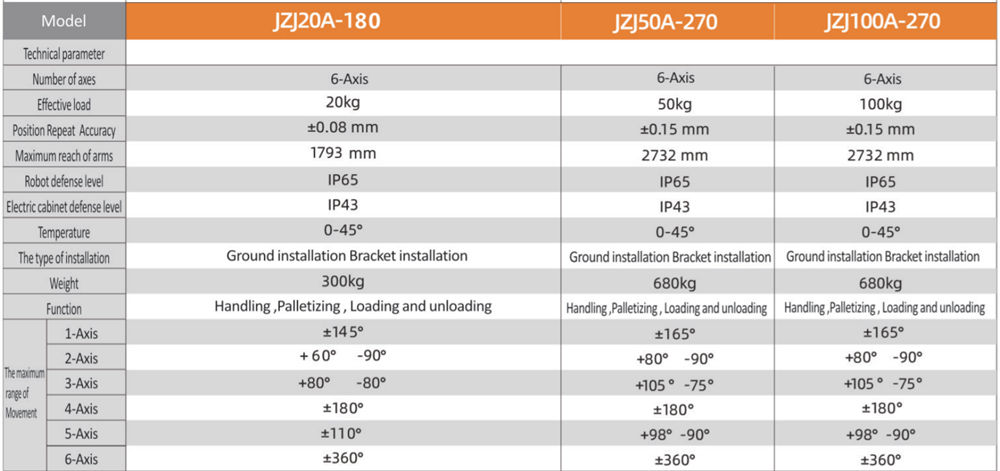
Parámetros técnicos de la serie de robots de soldadura